發布日期:2022-10-09 點擊率:56 品牌:西門子_Siemens
0 引言
隨著自動化水平的不斷提高,越來越多的工業控制場合需要精確的位置控制。因此,如何更方便、更準確地實現位置控制是工業控制領域內的一個重要問題。位置控制的精確性主要取決于伺服驅動器和運動控制器的精度。高端的運動控制模塊可以對伺服系統進行非常復雜的運動控制。但在有些需要位置控制的場合,其對位置精度的要求比較高,但運動的復雜程度不是很高,這就沒有必要選擇那些昂貴的高端運動控制系統。
S7-200系列PLC是一種體積小、編程簡單、控制方便的可編程控制器,它提供了多種位置控制方式可供用戶選擇,因此,如何利用該系列PLC實現對伺服電機運動位置較為精準的控制是本文的研究重點。
1. 基本控制系統
伺服系統分為液壓伺服系統、電氣-液壓伺服系統以及電氣伺服系統。本文主要討論了電氣伺服系統中的交流伺服系統,其基本組成為交流伺服電機、編碼器和伺服驅動器。交流伺服系統的工作原理是伺服驅動器發送運動命令,驅動伺服電機運動,并接收來自編碼器的反饋信號,然后重新計算伺服電機運動目標位置,從而達到精確控制伺服電機運動。
本伺服系統中選用Exlar公司生產的GSX50-0601型伺服直線電動缸。該電動缸由普通伺服電機和一個行星滾珠絲杠組成,用來實現將旋轉運動轉變為直線運動。此外,選用Xenus公司生產的XenusTM型伺服驅動器。它可以利用RS.232串口通信方式和外部脈沖方式實現位置控制。
一般來說,一個伺服系統運轉需要配置一個上位機,所以本系統采用西門子S7-200 PLC作為上位機控制器。通過高速脈沖輸出、EM253位置控制模塊、自由口通信三種方式控制伺服電機運動。
2. 高速脈沖輸出模式
西門子CPU224XP配置兩個內置脈沖發生器,它有脈沖串輸出(PTO)和脈沖寬度調制輸出兩種脈沖發生模式可供選擇。這兩個脈沖發生器的最大脈沖輸出頻率為100 kHz。在脈沖串輸出方式中,PLC可生成一個50%占空比脈沖串,用于步進電機或伺服電機的速度和位置的控制。
2.1 硬件構成
圖1為高速脈沖輸出方式的位置控制原理圖。控制過程中,將伺服驅動器工作定義在脈沖+方向模式下,Q0.0發送脈沖信號,控制電機的轉速和目標位置;Qo,發送方向信號,控制電機的運動方向。伺服電動缸上帶有左限位開關LIM一、右限位開關LIM+以及參考點位置開關REF。三個限位信號分別連接到CPU224XP的I0.0~I0.2三個端子上,可通過軟件編程,實現限位和找尋參考點。
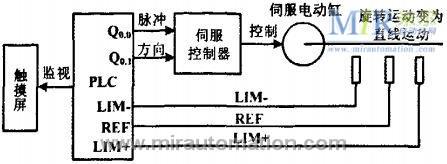
圖1 位置控制原理圖
2.2 程序設計
高速脈沖串輸出(PTO)可以通過Step 7 Micro/WIN的位置控制向導進行組態,也可通過軟件編程實現控制。PTO輸出方式沒有專門的位置控制指令,只有一條脈沖串輸出指令,而且在脈沖發送過程中不能停止,也不能修改參數。為解決以上問題,可以設置脈沖計數值等于10(或更小),并能使脈沖發送指令PLS處于激活狀態。這樣,就可以在任一脈沖串發送完之后修改脈沖周期。
圖2為高速脈沖輸出方式位置控制流程圖。控制思路為:通過PTO模式輸出,可以控制脈沖的周期和個數;通過啟用高速計數器HSC,對輸出脈沖進行實時計數和定位控制,以控制伺服電機的運動過程。
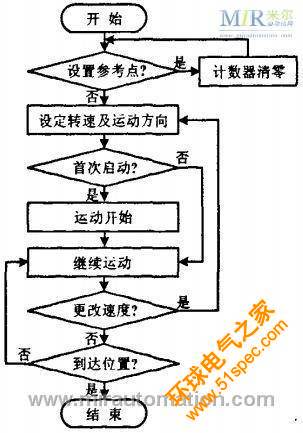
圖2 位置控制流程圖
3. EM253位置控制模塊
EM253位置控制模塊是西門子S7-200的特殊功能位置控制模塊,它能夠產生脈沖串用于步進電機與伺服電機的速度和位置的開環控制。
3.1 硬件構成
如圖3所示為EM253位置控制原理圖,定義伺服驅動器工作在脈沖+方向模式下。P0口發送脈沖,P1口發送方向,DIS端硬件使能放大器,并同時清除放大器錯誤。LIM-、LIM+、REF分別為電機左限位、右限位以及參考點。
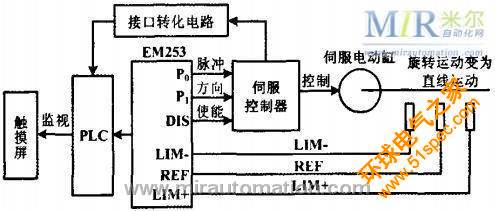
圖3 EM253位置控制原理圖
3.2 程序設計
EM253位置控制模塊可以通過Step 7-Micro/WIN進行向導配置,配置完成后系統將自動生成子程序,編程簡單、可輕松實現手動、自動、軌跡運行模式。由于EM253屬于開環控制,不能很好地反饋電機實際運動情況。因此,利用伺服驅動器本身的差分輸出信號,通過伺服驅動器軟件設置,反饋給PLC,實現閉環位置控制。但由于直線伺服電動缸與PLE可允許發送接收信號存在一定差別,因此,需要對輸入到PLC的信號進行電平的轉化以及降低伺服驅動器發送的反饋脈沖頻率。PLC對輸入脈沖進行累加,從而得到電機的實際運轉位置與運轉速度,其脈沖計數程序如下。
①計數器初始化程序
LD SMO. 1//首次掃描時
MOVB 16#FC, SMB47
//SMB47 =16#F4,SMB47為高速計數器1的控制字節
HDEF 1,9
//將HSC1配置為正交模式
MOVD 0, SMD48
//設置HSCI的新初始值為0
MOVD 20000,SMD52
//設置HSCI的新預設值為20 000
HSC I//激活高速計數器I
②脈沖計數程序
LD SMO. 0
MOVD HC1,VD600
//將高速計數器1所記數值存儲在VD600中
DTR VD600, VD610
// VD601〕中的整數轉化為實數,存人VD6100
/R SOOO,VD610
// VD610除以5000存入VD610 ,
5001〕為電機旋轉一周編碼器發送脈沖數
*R 2.54, VD610
//VD610乘以2.54存人VD610 ,
2.54為電機旋轉一周移動的距離
4 RS-232串口通信方式
4.1硬件構成
西門子CPU22<tXP支持無協議通信,即用戶僅需要對數據格式、傳輸速率、起始/停止碼等進行簡單設定,PLC與外部設備間就可進行直接數據發送與接收的一種通信方式。伺服系統和PLC分別作為系統的主從站。PLC控制器通過該通信功能可實現對伺服驅動器進行運行控制、參數讀取、伺服驅動器當前運動狀態的讀取等操作。
當S7-200系列PLC工作在自由口通信模式下時,一般通過CPU模塊的集成接口進行通信。CPU集成接口采用了PPI硬件規范,其接口為RS-485串口,因此,當S7-200系列PLC的CPU與帶有RS-232標準接口的計算機或伺服驅動器連接時,需要配套選用S7-200 PLC的PC/PPI轉換電纜或一個RS-232/RS-485轉換器。
4.2 PLC與伺服系統通信
4.2.1 報文構成
S-200 PLC在無協議通信方式工作時,不需要任何通信協議,通信參數需要根據與其進行通信的伺服驅動器的通信格式進行設定。本伺服系統選用的Xe-nus伺服驅動器可通過RS-232與PLC利用ASCII碼進行通信,其ASCII碼消息命令格式如下:
其中:
4.2.2 程序設計
程序設計時,將伺服驅動器工作定義在可編程位置模式。該模式支持實時更改伺服電機的運動速度、位置,通過RS-232接收來自PLC的ASCII碼命令,執行運動。部分程序如下:
①初始化程序
LD SMO. 1 //首次掃描
MOVB 9, SMB30
//設置自由端口0
通信方式SMB30=9、8位數據位、9600、PPI
MOVB 188, SMB87
//設置自由端口。接收信息控制5MB87 =188
MOVB 13,SMB89 //設置自由端口0
結束字符SMB89=13,即結束字符=
5 三種控制方式的分析比較
上文分別從硬件結構與軟件編程等方面,詳細介紹了三種伺服電機位置控制方式。為了更好地理解這三種方式的差異,我們從軟件與控制結果的角度作如下分析比較。
①軟件編程
脈沖串輸出方式可以輕松實現一些簡單的位置與速度控制,具有硬件要求簡單、可取代EM253并節省系統硬件配置等功能。但在編寫較為復雜的運動程序時(如絕對運動需要確定電機運動的原點位置),由于步驟繁瑣,故不能采用該方法加以實現。
②控制精度
高速脈沖輸出方式和EM253位置控制方式均屬于開環位置控制,它們只負責發送脈沖,但當伺服電機或伺服驅動器出現故障時,PLC或EM253都沒得到相應的反饋信息,仍然在不斷向外發送脈沖;而采用通信控制方式則是在每次發送命令結束時,伺服驅動器均會對發送的命令做出應答。
③位置控制結果
伺服電機的速度等于PLC或EM253的輸出脈沖頻匆電機每轉一圈發送的脈沖數,或直接通過RS-232串口發送ASCII碼控制。由于S7-200系列PLC(除CPU224XP)高速脈沖輸出口的最高頻率為20 kHz,EM253的最高輸出頻率為200 kHz,RS-232串口通信控制方式則是發送ASCII碼設定運動速度。因此,對于要求高速運動,或高控制精度的伺服驅動器系統,RS-232串口通信控制方式最優,而高速脈沖輸出方式則不能滿足要求。
采用高速脈沖輸出控制和EM253位置控制方式時,伺服驅動器工作在脈沖+方向模式下,而處于通信控制方式時,伺服驅動器工作在可編程位置控制模式下。高速脈沖輸出方式不能根據實際狀況實時更改伺服電機運動速度與目標位置,EM253位置控制方式只能在手動模式下實時更改速度,采用通信控制方式時,當伺服驅動器設置電機在可編程位置控制模式下運動時,可通過RS-232串口發送ASCII碼命令,實時更改速度和目標位置。
6結束語
高速脈沖輸出方式主要應用于對速度及位置控制精度要求均不高的簡單位置控制中,從而節省硬件資源。EM253位置控制方式編程簡單,它支持高速脈沖輸出、支持線性的加減速功能、提供可組態的測量系統,可以使用工程單位如毫米,支持絕對、相對和手動的位控方式,提供連續操作。RS-232串口通信方式在三種位置控制方式中最具優勢,它支持閉環控制,可實時調節速度、位置等;但由于伺服驅動器型號的不同,所以并不是所有的伺服驅動器都支持串口通信方式。
在實際應用中,將EM253位置控制方式應用于注塑機注氣系統中,經過反復實驗,可實現手動控制、半自動控制、全自動控制等三種控制方式,編程簡單。觸摸屏操作界面簡潔、操作靈活、工作可靠穩定。
經過詳細介紹與分析比較,三種位置控制方式各有優缺點,各有其自身所適合的應用場合,這為今后類似的位置控制提供了一定的參考價值。
下一篇: PLC、DCS、FCS三大控
上一篇: 索爾維全系列Solef?PV

型號:M2D068-DF
價格:面議
庫存:999
訂貨號:M2D068-DF


