發布日期:2022-04-18 點擊率:861 品牌:組態王_Kingview
電動機除了上述電動狀態外,在下述情況運行時,則屬于電動機的制動狀態。在負載轉矩為位能轉矩的機械設備中(例如起重機下放重物時,運輸工具在下坡運行時),使設備保持一定的運行速度;在機械設備需要減速或停止時,電動機能實現減速和停止的情況下,電動機的運行屬于制動狀態。
三相異步電動機的制動方法有下列兩類:機械制動和電氣制動。機械制動是利用機械裝置使電動機從電源切斷后能迅速停轉。它的結構有好幾種形式,應用較普遍的是電磁抱閘,它主要用于起重機械上吊重物時,使重物迅速而又準確地停留在某一位置上。
電氣制動是使異步電動機所產生的電磁轉矩和電動機的旋轉方向相反。電氣制動通常可分為能耗制動.反接制動和回饋制動(再生制動)等3類。
1.能耗制動
方法:將運行著的異步電動機的定子繞組從三相交流電源上斷開后,立即接到直流電源上,如圖所示,用斷開QS,閉合SA2來實現。
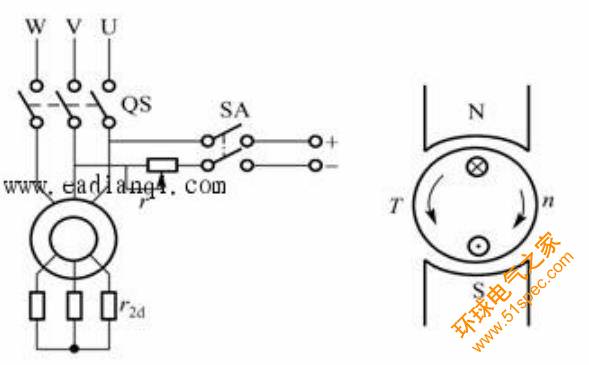
圖 感應電動機能耗制動原理圖
當定子繞組通入直流電源時,在電動機中將產生一個恒定磁場。轉子因機械慣性繼續旋轉時,轉子導體切割恒定磁場,在轉子繞組中產生感應電動勢和電流,轉子電流和恒定磁場作用產生電磁轉矩,根據右手定則可以判電磁轉矩的方向與轉子轉動的方向相反,為制動轉矩。在制動轉矩作用下,轉子轉速迅速下降,當n=0時,T=0,制動過程結束。
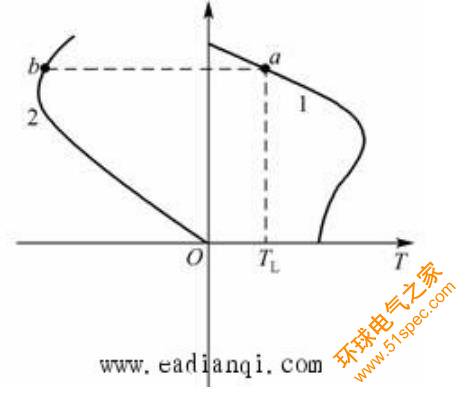
能耗制動機械特性圖
動能轉變為電能,消耗在轉子回路的電阻上,所以稱能耗制動。如圖所示,電動機正向運行時工作在固有機械特性曲線1的a點上。定子繞組改接直流電源后,因電磁轉矩與轉速反向,因而能耗制動時機械特性位于第二象限,如曲線2。電動機運行點也移至b點,并從b點順曲線2減速到O點。
對于采用能耗制動的異步電動機,既要求有較大的制動轉矩,又要求定.轉子回路中電流不能太大使繞組過熱。根據經驗,能耗制動時對于籠型異步電動機取直流勵磁電流為(4~5)I0,對于繞線轉子異步電動機取(2~3)I0,制動所串電阻r=(0.2~0.4)能耗制動的優點是制動力強,制動較平穩。缺點是需要一套專門的直流電源供制動用。
2.反接制動
反接制動分為電源反接制動和倒拉反接制動兩種。
(1)電源反接制動
方法:改變電動機定子繞組與電源的聯接相序,如圖所示,斷開QS1,接通QS2即可。
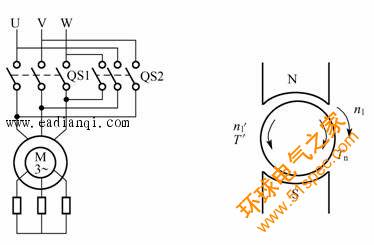
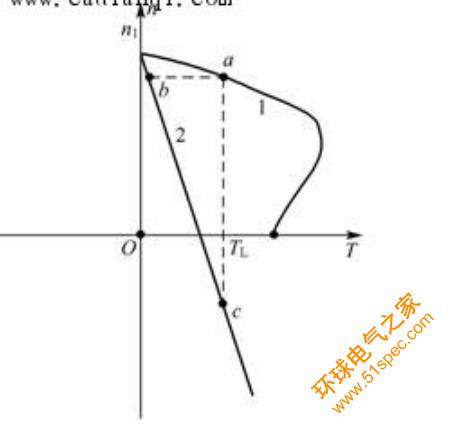
電源的相序改變,旋轉磁場立即反轉,而使轉子繞 組中感應電勢.電流和電磁轉矩都改變方向,因機械慣性,轉子轉向未變,電磁轉矩與轉子的轉向相反,電動機進行制動,此稱電源反接制動。如圖8.14所示,制動前,電動機工作在曲線1的a點,電源反接制動時,n1<0,n>0,相應的轉差率s= >1,且電磁轉矩T<0,機械特性如曲線2所示。因機械慣性,轉速瞬時不變,工作點由a點移至b點,并逐漸減速,到達c點時n=0,此時切斷電源并停車,如果是位能性負載需使用抱閘,否則電動機會反向起動旋轉。一般為了限制制動電流和增大圖 電源反接制動機械特性
>1,且電磁轉矩T<0,機械特性如曲線2所示。因機械慣性,轉速瞬時不變,工作點由a點移至b點,并逐漸減速,到達c點時n=0,此時切斷電源并停車,如果是位能性負載需使用抱閘,否則電動機會反向起動旋轉。一般為了限制制動電流和增大圖 電源反接制動機械特性

制動轉矩,繞線轉子異步電動機可在轉子回路串入制動電阻,特性如曲其線3所示,制動過程同上。
(2)倒拉反接制動
方法:當繞線轉子異步電動機拖動位能性負載時,在其轉子回路串入很大的電阻。其機械特性如圖所示。
當異步電動機提升重物時,其工作點為曲線1上的a點。如果在轉子回路串入很大的電阻,機械特性變為斜率很大的曲線2,因機械慣性,工作點由a點移到b點,因此時電磁轉矩小于負載轉矩,轉速下降。當電動機減速至n=0時,電磁轉矩仍小于負載轉矩,在位能負載的作用下,使電動機反轉,直至電磁轉矩等于負載轉矩,電動機才穩定運行于c點。因這是由于重物倒拉引起的,所以稱為倒拉反接制動(或稱倒拉反接運行),其轉差率
 >1 圖倒拉反接制動的機械特性
>1 圖倒拉反接制動的機械特性
與電源反接制動一樣,s都大于1繞線轉子異步電動機倒拉反接制動狀態,常用于起重機低速下放重物。
3.回饋制動
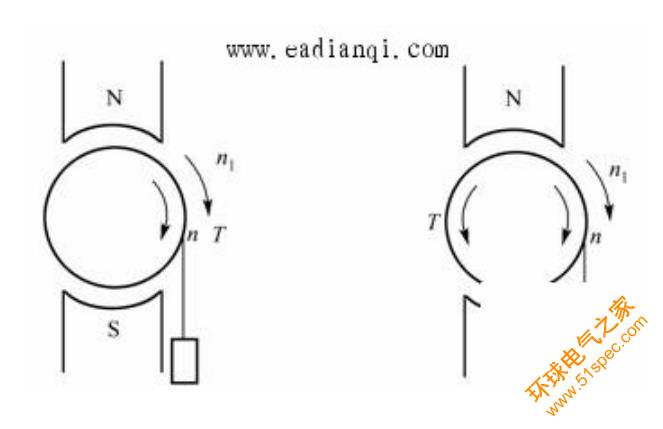
(a) 電動運行 (b)回饋制動
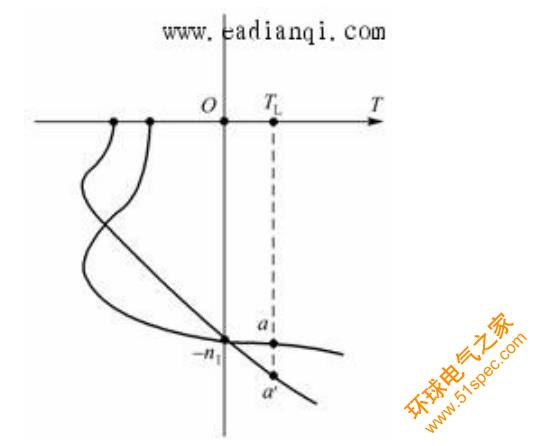
圖 回饋制動原理圖
電流和轉矩的方向都發生了變化,如圖(b)所示,轉矩方向與轉子轉向相反,成為制動轉矩。此時電動機將機械能轉化為電能饋送電網,所以稱回饋制動。
制動時工作點如圖的a點所示,轉子回路所串電阻越大,電動機下放重物的速度越快,見圖中虛線所示a’點。為了限制下放速度,轉子回路不應串入過大的電阻
下一篇: PLC、DCS、FCS三大控
上一篇: 索爾維全系列Solef?PV


